


設計耐用且容錯的運動控制反饋系統(一)
2008/5/27 16:19:00
為成功設計出魯棒且容錯的運動控制系統設計,設計工程師必須了解接收器IC、編碼器信號電纜、終端匹配和PCB設計的重要性。本文將對運動控制系統設計中的關鍵問題進行討論。
成功的設計工程師必須了解接收器IC、編碼器信號電纜、端接和PCB布局所充當的重要角色。如今,要求頗高的工業應用需要魯棒而可靠的機器人和自動化機器能在惡劣的條件下一周七天一天24小時地全天候工作。
值得慶幸的是,現代化的高速伺服系統可以被設計為一個魯棒且容錯的運動控制反饋系統。運動控制器的接收器電路能預先對潛在錯誤作出響應,并且接收器電路的合理PCB布局可以防止編碼器數據中的噪聲問題。設計工程師還應該考慮包括接收器電路端接在內的正交編碼器的信號布線系統。這些預防措施將使魯棒的運動控制反饋系統在錯誤狀態下能穩定運行并是可預測的。
當今的許多性能改進都得益于新技術和微電子學。這些創新技術通過消除機器人在共享工作空間的碰撞問題、改進任務分配并提高伺服準確度,提供了更魯棒的自動系統。魯棒的系統運行的關鍵在于如何處理機械和電氣故障。本文討論魯棒且容錯的運動控制系統的設計,該系統的反饋通道采用正交編碼器。
伺服系統
現代化的自動系統在采用閉環反饋作為運動控制。它們通常包括一個伺服系統,該伺服系統將馬達驅動和反饋元件結合起來,以準確、穩定地控制速度和位置。圖1顯示了典型伺服系統中的各種系統級元器件。
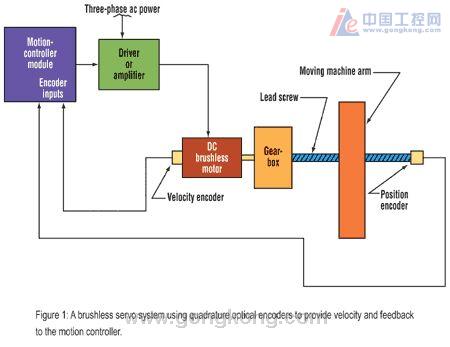
直流無刷馬達是高性能和高速度應用的首選。直流電刷馬達和步進馬達適用于速度較低且要求較低的應用。本文討論的設計均采用無刷馬達。這種馬達通常在其終端傳動軸上附帶正交編碼器,該編碼器可以確定傳動軸速率和轉碼點以控制馬達的線圈轉換序列。機器的旋轉傳動軸上的另一個正交編碼器提供該傳動軸的位置數據,該數據通常會由于齒輪頭和絲杠組合的齒隙引起的誤差而與馬達傳動軸的實際位置有所不同。
典型的運動控制器卡和模塊包括一個運動控制IC、一個微處理器和一個用于處理高速編碼器信號的DSP或定制ASIC。該控制器將速度和旋轉方向信號提供給驅動器或放大器,令它們提供適當級別的電壓和電流(功率)來操作馬達。為了設計帶有反饋的魯棒且容錯的運動控制系統,在系統級設計階段考慮下列問題:控制器編碼器輸入電路(接收器電路);接收器電路的PCB設計;編碼器信號布線系統。在設計容錯反饋系統時,還應考慮運動控制器的輸入(比如硬線連接的緊急停止)和輸入限制等。
控制器的接收器電路
馬達的正交編碼器沿著電纜將六個RS-422/RS-485信號(A、A-;B、B-;Index、Index-)發送至運動控制器的接收器電路(編碼器輸入)。接收器將RS-422信號轉換成邏輯電平信號(我們之所以采用RS-422信號,是因為系統只有一個發射器)并將這些信號提供給運動控制器電路進行處理。接收器電路必須對伺服系統環境中的各種故障作出響應,包括開路、短路和噪聲。
圖2顯示了典型運動控制器中的編碼器輸入接收器電路。MAX3095是帶有±15 kV ESD保護的10 Mbps、5V、四路RS-422/RS-485接收器。對于帶有連接至外部元件的編碼器輸入的容錯系統,ESD保護是必需的。在本電路中,所有編碼器輸入線路上的ESD保護都在器件內部。沒有外部ESD保護元件可大大減少電路所需的PCB面積。
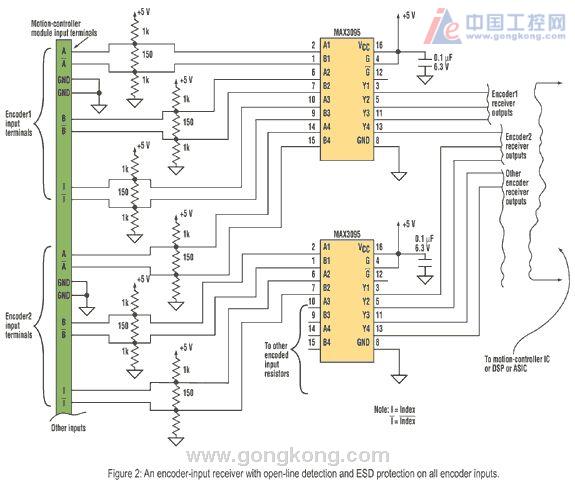
150Ω電阻可以為從正交編碼器沿著雙絞線電纜傳輸的每對補償信號對提供適當的終端匹配。電纜發生斷裂或中斷連接會產生開路故障,必須檢測到該故障之后,活動控制器才能執行適當的操作。作為故障保護測量方法,當一對輸入信號開路時,MAX3095接收器會輸出邏輯高作為響應。用1kΩ的電阻對接收器的“A”輸入進行偏壓,使其超過“B”輸入至少200mV。這些電阻對在存在輸入終端電阻的情況下維持故障保護輸出也是必需的。本電路提供ESD保護、開路檢測和輸出短路保護,但它不檢測短路輸入。
成功的設計工程師必須了解接收器IC、編碼器信號電纜、端接和PCB布局所充當的重要角色。如今,要求頗高的工業應用需要魯棒而可靠的機器人和自動化機器能在惡劣的條件下一周七天一天24小時地全天候工作。
值得慶幸的是,現代化的高速伺服系統可以被設計為一個魯棒且容錯的運動控制反饋系統。運動控制器的接收器電路能預先對潛在錯誤作出響應,并且接收器電路的合理PCB布局可以防止編碼器數據中的噪聲問題。設計工程師還應該考慮包括接收器電路端接在內的正交編碼器的信號布線系統。這些預防措施將使魯棒的運動控制反饋系統在錯誤狀態下能穩定運行并是可預測的。
當今的許多性能改進都得益于新技術和微電子學。這些創新技術通過消除機器人在共享工作空間的碰撞問題、改進任務分配并提高伺服準確度,提供了更魯棒的自動系統。魯棒的系統運行的關鍵在于如何處理機械和電氣故障。本文討論魯棒且容錯的運動控制系統的設計,該系統的反饋通道采用正交編碼器。
伺服系統
現代化的自動系統在采用閉環反饋作為運動控制。它們通常包括一個伺服系統,該伺服系統將馬達驅動和反饋元件結合起來,以準確、穩定地控制速度和位置。圖1顯示了典型伺服系統中的各種系統級元器件。
直流無刷馬達是高性能和高速度應用的首選。直流電刷馬達和步進馬達適用于速度較低且要求較低的應用。本文討論的設計均采用無刷馬達。這種馬達通常在其終端傳動軸上附帶正交編碼器,該編碼器可以確定傳動軸速率和轉碼點以控制馬達的線圈轉換序列。機器的旋轉傳動軸上的另一個正交編碼器提供該傳動軸的位置數據,該數據通常會由于齒輪頭和絲杠組合的齒隙引起的誤差而與馬達傳動軸的實際位置有所不同。
典型的運動控制器卡和模塊包括一個運動控制IC、一個微處理器和一個用于處理高速編碼器信號的DSP或定制ASIC。該控制器將速度和旋轉方向信號提供給驅動器或放大器,令它們提供適當級別的電壓和電流(功率)來操作馬達。為了設計帶有反饋的魯棒且容錯的運動控制系統,在系統級設計階段考慮下列問題:控制器編碼器輸入電路(接收器電路);接收器電路的PCB設計;編碼器信號布線系統。在設計容錯反饋系統時,還應考慮運動控制器的輸入(比如硬線連接的緊急停止)和輸入限制等。
控制器的接收器電路
馬達的正交編碼器沿著電纜將六個RS-422/RS-485信號(A、A-;B、B-;Index、Index-)發送至運動控制器的接收器電路(編碼器輸入)。接收器將RS-422信號轉換成邏輯電平信號(我們之所以采用RS-422信號,是因為系統只有一個發射器)并將這些信號提供給運動控制器電路進行處理。接收器電路必須對伺服系統環境中的各種故障作出響應,包括開路、短路和噪聲。
圖2顯示了典型運動控制器中的編碼器輸入接收器電路。MAX3095是帶有±15 kV ESD保護的10 Mbps、5V、四路RS-422/RS-485接收器。對于帶有連接至外部元件的編碼器輸入的容錯系統,ESD保護是必需的。在本電路中,所有編碼器輸入線路上的ESD保護都在器件內部。沒有外部ESD保護元件可大大減少電路所需的PCB面積。
150Ω電阻可以為從正交編碼器沿著雙絞線電纜傳輸的每對補償信號對提供適當的終端匹配。電纜發生斷裂或中斷連接會產生開路故障,必須檢測到該故障之后,活動控制器才能執行適當的操作。作為故障保護測量方法,當一對輸入信號開路時,MAX3095接收器會輸出邏輯高作為響應。用1kΩ的電阻對接收器的“A”輸入進行偏壓,使其超過“B”輸入至少200mV。這些電阻對在存在輸入終端電阻的情況下維持故障保護輸出也是必需的。本電路提供ESD保護、開路檢測和輸出短路保護,但它不檢測短路輸入。




 投訴建議
投訴建議
提交
查看更多評論
其他資訊

超越傳統直覺,MATLAB/Simulink助力重型機械的智能化轉型

新大陸自動識別精彩亮相2024華南國際工業博覽會

派拓網絡被Forrester評為XDR領域領導者

智能工控,存儲強基 | 海康威視帶來精彩主題演講

展會|Lubeworks路博流體供料系統精彩亮相AMTS展會